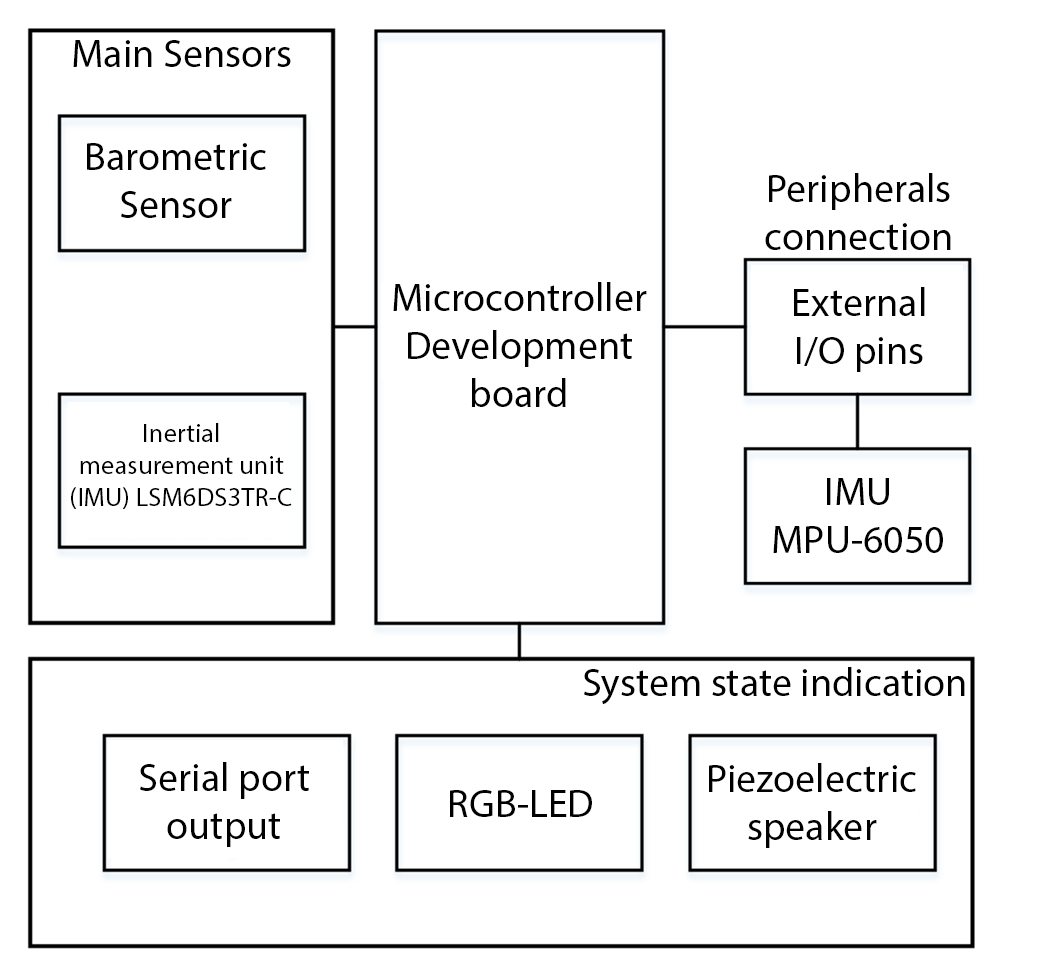
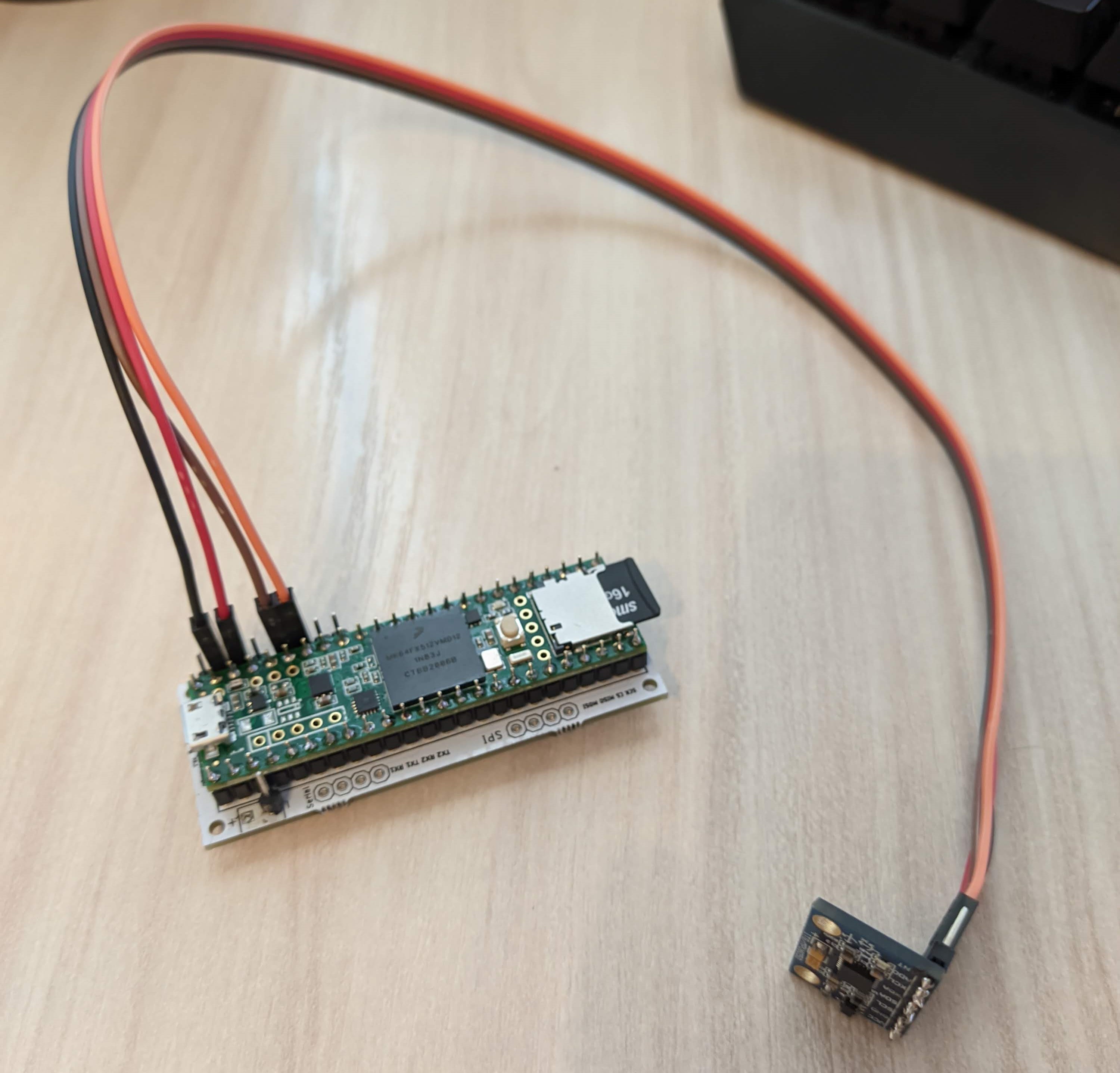
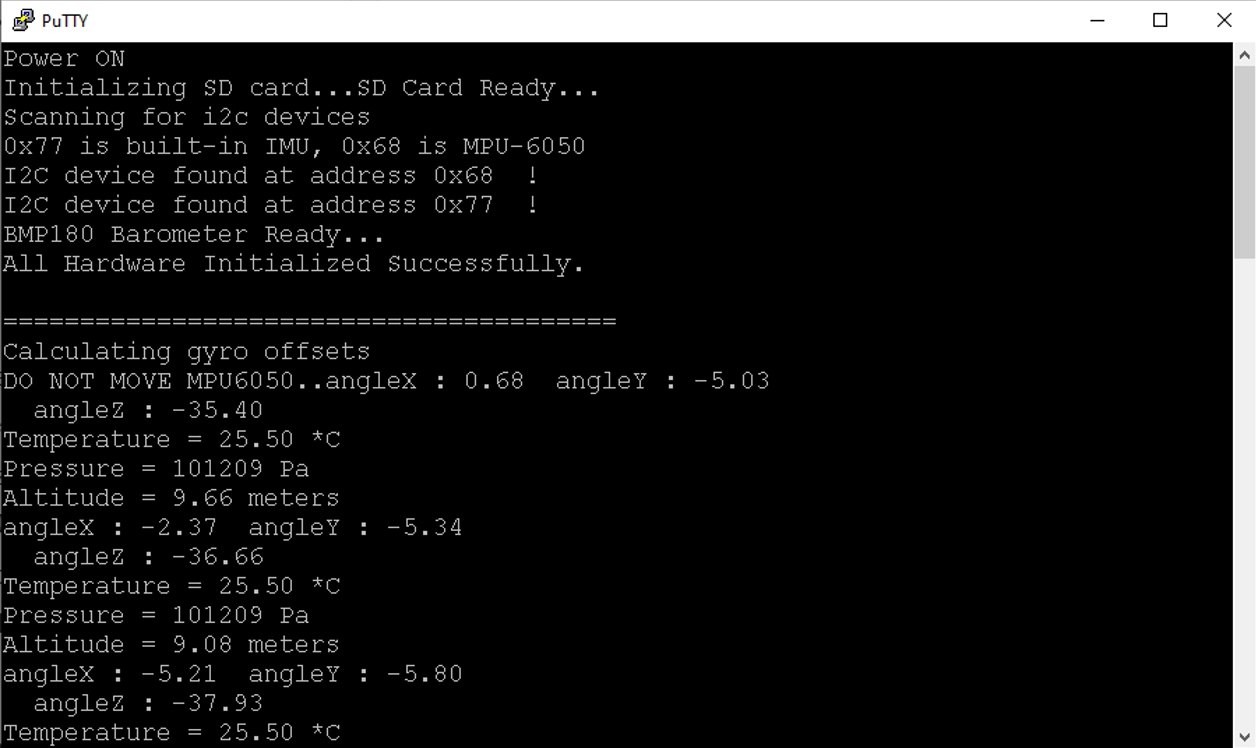
The device is an onboard recorder, which records the barometric and positional data of the sounding rocket. Since the task is to develop a prototype of the device, a partially modular structure of the device is assumed for the convenience of testing. The Arduino programming language (based on Wiring) was chosen as the software platform for the product as a prototype because of its simplicity and speed of development. The final project implies the use of the C language with assembler inserts to increase the speed of the program as well as to reduce the space occupied by it in the memory of the microcontroller.
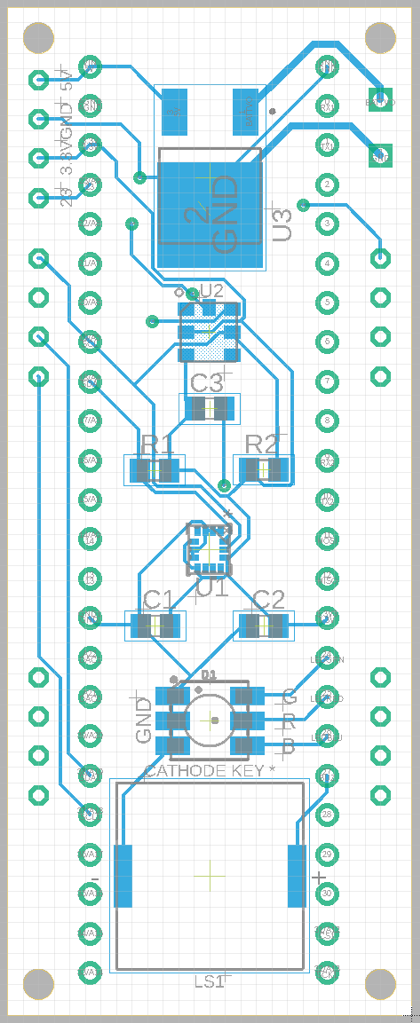
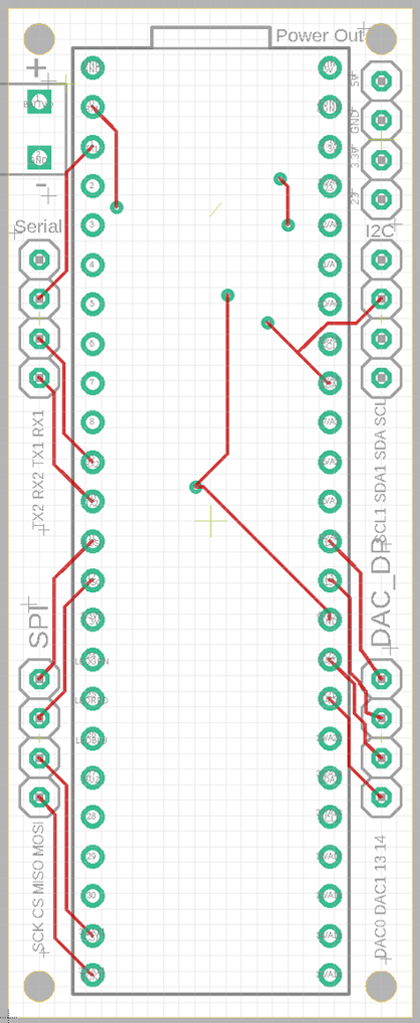
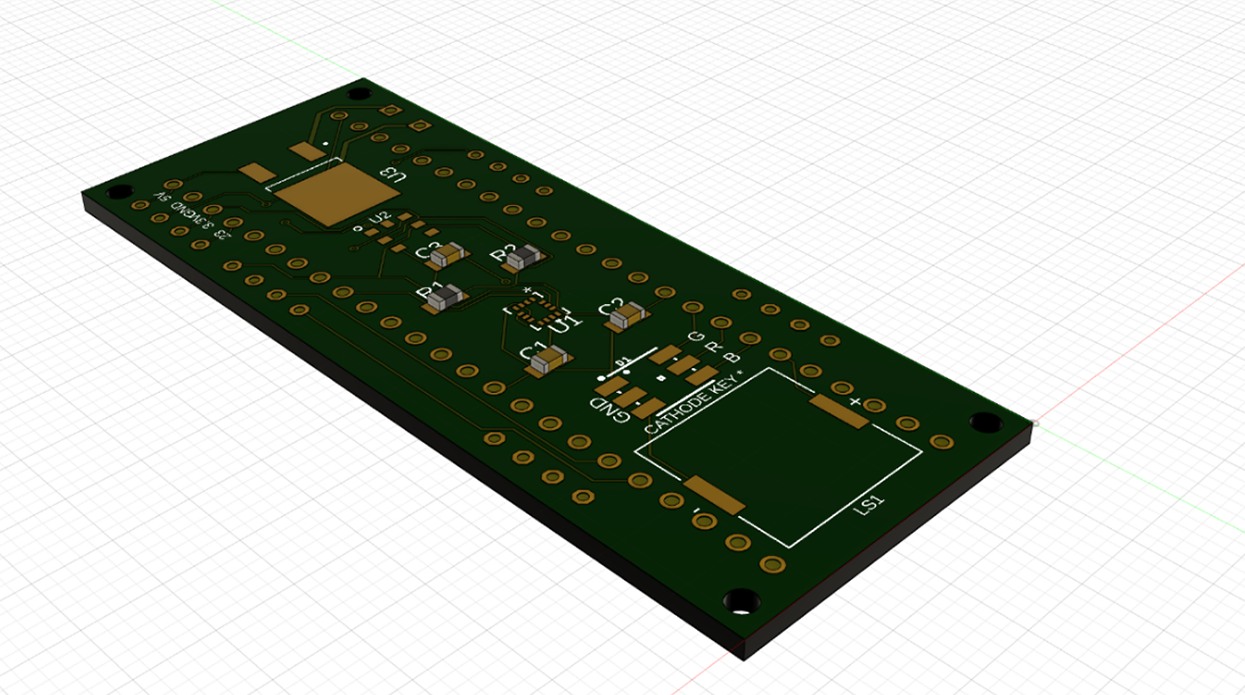
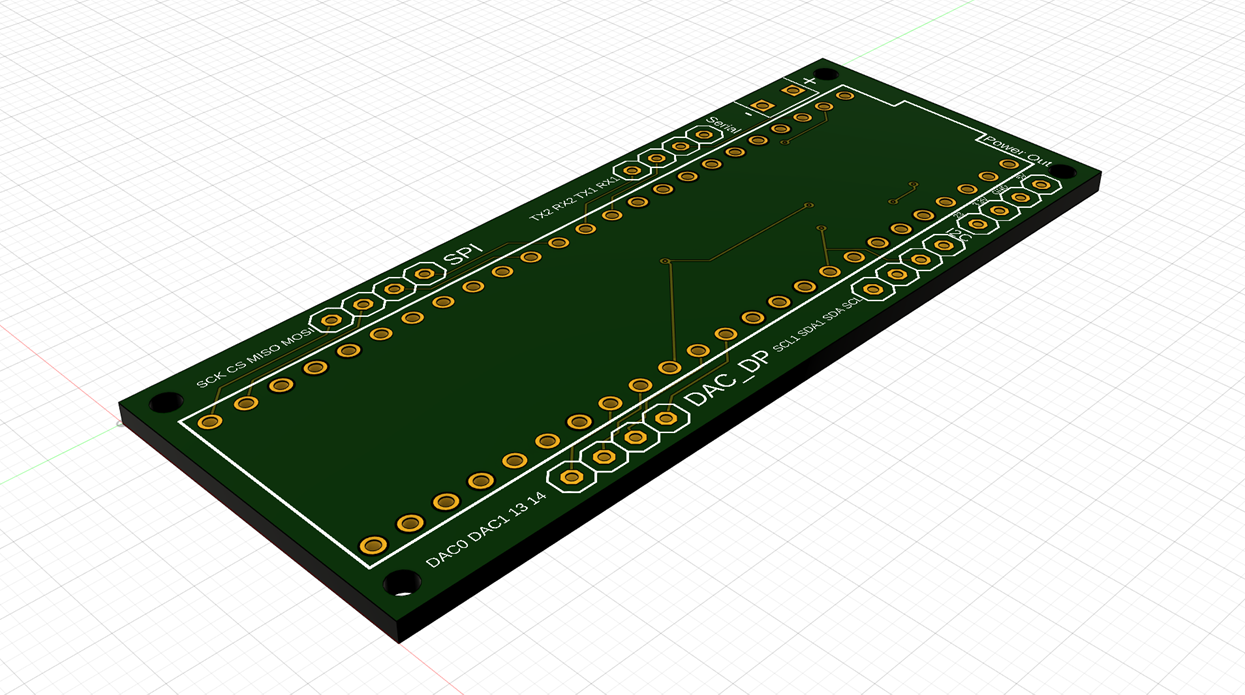
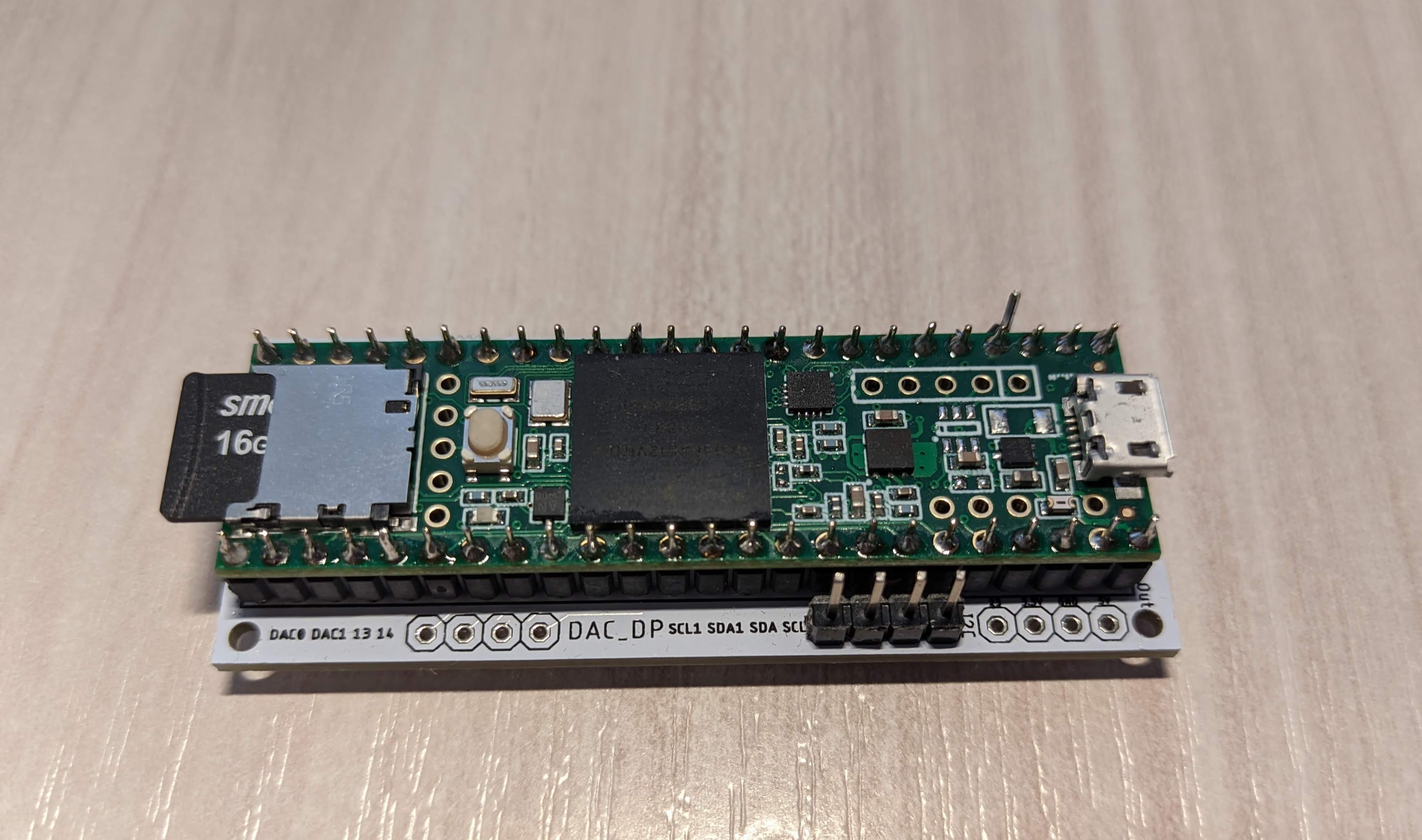
Barometric sensor BMP180 and inertial measurement module LSM6DS3RT are connected to the same I2C bus. Autodesk Eagle and Autodesk Fusion 360 were used as CAD software. The printed circuit board is a two-layer board with dimensions 26x65 mm. The material of the board is FR4 fiberglass. Both masks, top and bottom were made in white glossy color with black markings. The plating of the contact pads was done with tin-lead solder grade 63. The diameter of the holes was at least 0.3 mm. The thickness of the board was 1.5 mm. The width of the signal tracks on the PCB was 0.2 mm, the width of the power tracks was 0.45 mm. The diameter of the transition holes was 0.35 mm. For the convenience of mounting, additional markings were applied to the board. For the convenience of sensor connection, designations corresponding to the contacts were applied next to the external I/O contacts.